
Building Human-level Generalist Agent Through
Copy->Imitation->Self-Exploration.
An open-source embodied AI infrastructure for fullbody physiological capture, multi-modal perception, skill learning and simulation.
Welcome to join our forum to make RobotFlow better.
Featured Full-Stack Pipeline
Human-like and beyond
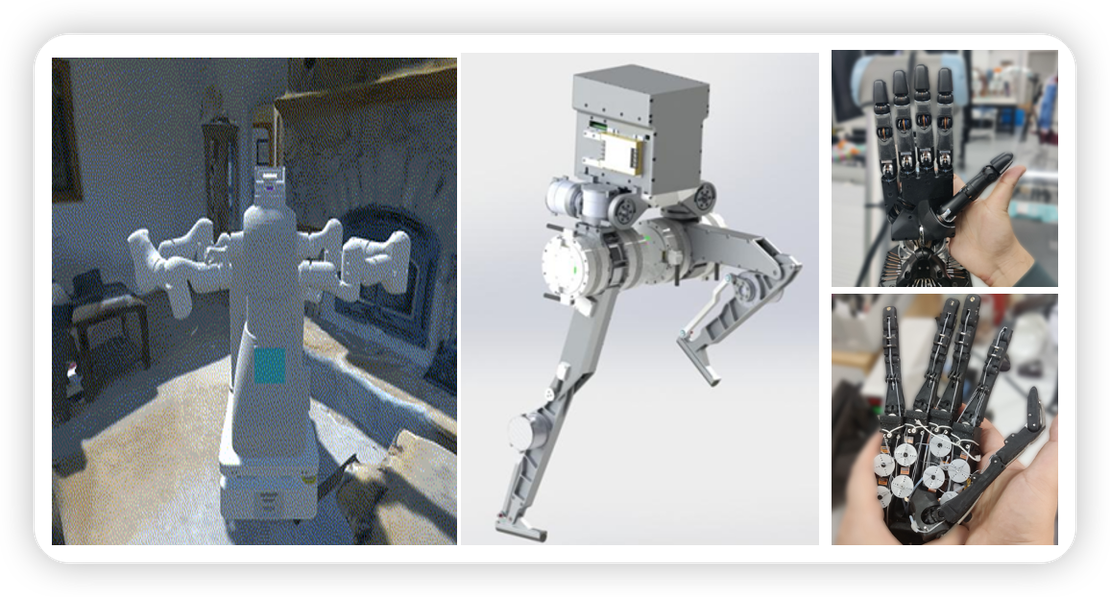
Dexterous Hands.
Mobile Manipulator.
Robot Leg.
Expression.
Humanoid.
…
Multi-modal Sensors
RGB-X.
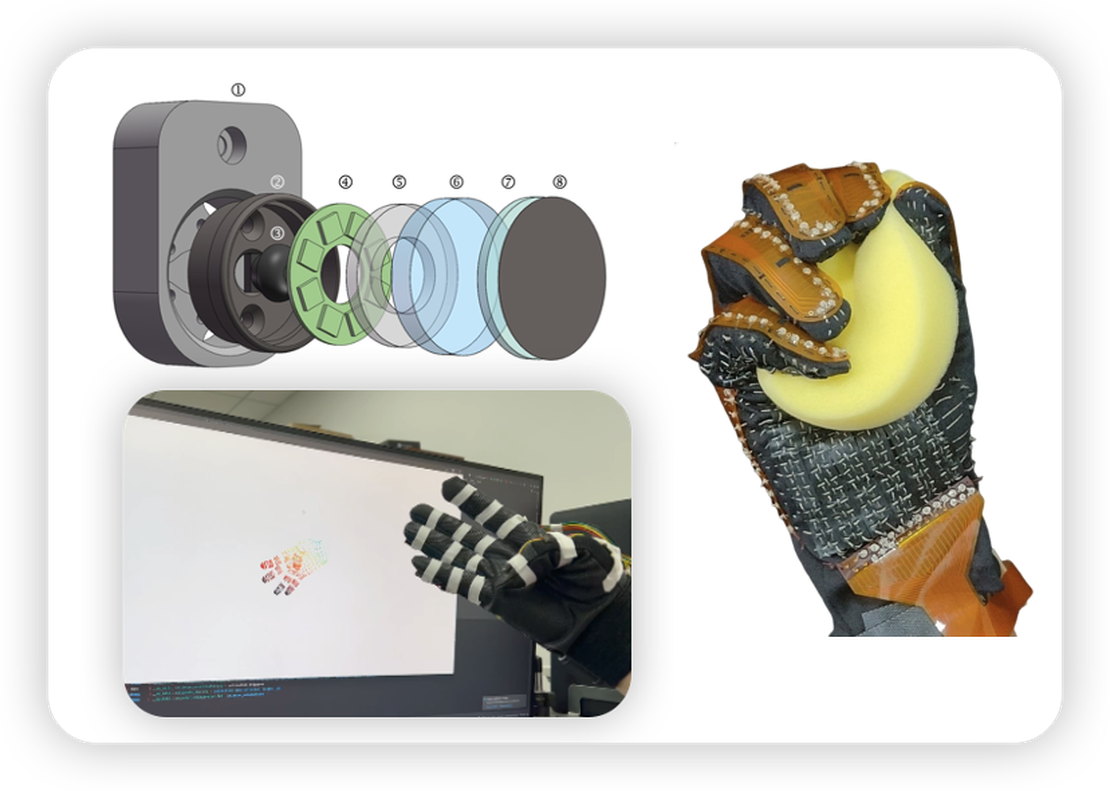
Tactile.
EMG.
EEG.
Ultrasound.
…
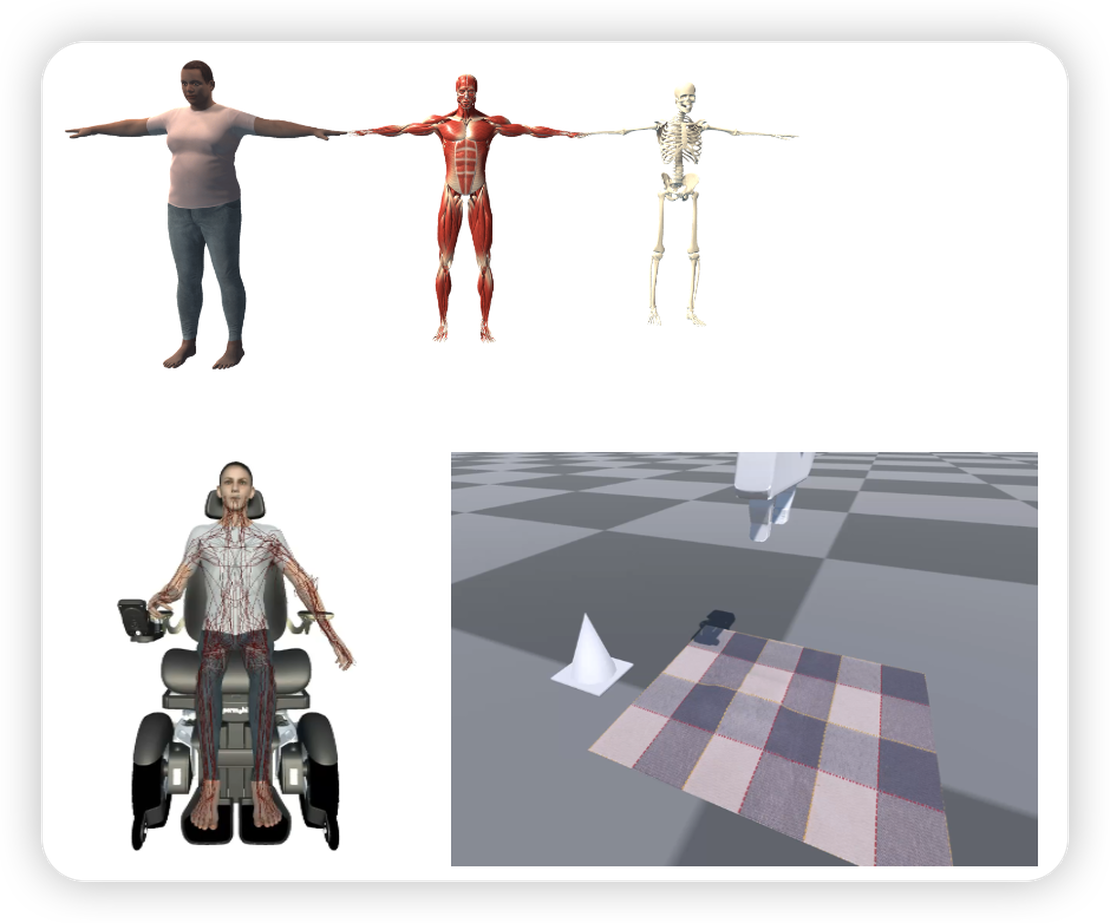
Physics-based Simulation
Simulation environment.
Simulation acceleration.
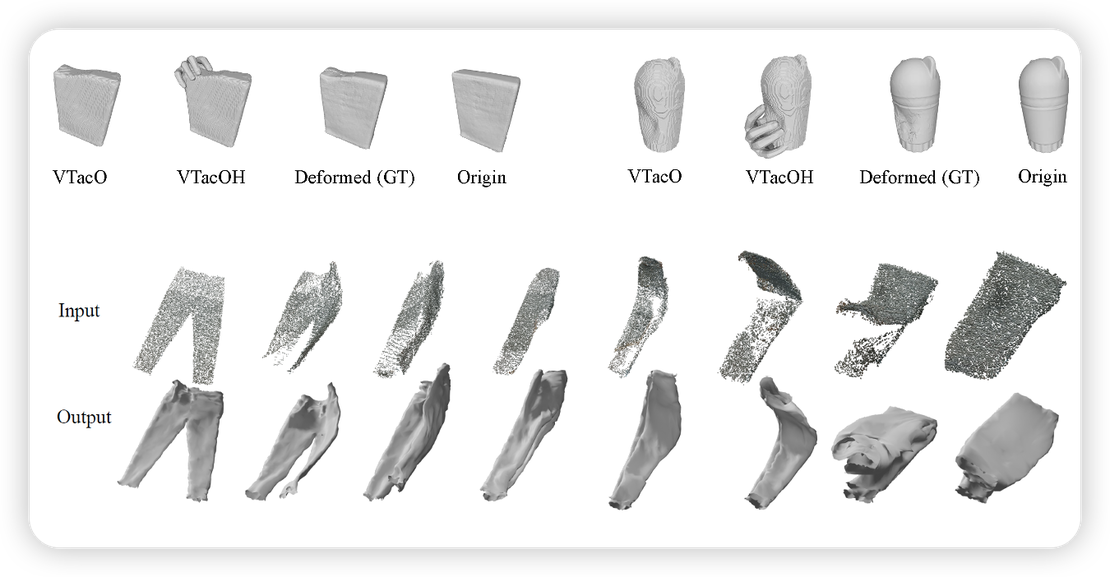
Perception
Multi-modal.
Interactive.
Data Engine.

Scalable Skill Learning
Copy.
Imitation.
Self-Exploration.
Ecosystem
Tools, datasets, robot systems boosted by RobotFlow.

Community
Join the RobotFlow developer community to communicate, collaborate and contribute.